

玩转松下伺服:记住这六个基本参数
在设备调试中,无论采用何种控制方式,都需要设置一些基本参数,其中包括
Pr0.00 旋转方向设定
Pr0.01 控制模式设定
Pr0.03 实时自动调整机械刚性
Pr0.04 惯量比
Pr0.15 绝对式编码器设定
Pr0.16 外置再生电阻设定
这些参数在松下伺服中设置正确以否,关系到电机能不能正常运转,它们的正确设置对于实现设备初期调式至关重要。
Pr0.00 旋转方向设定
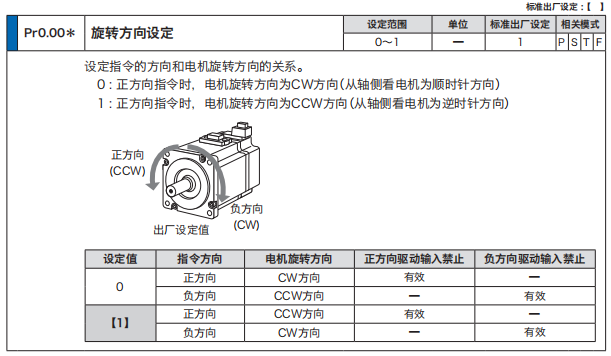
只要大家记住,不管电机往CCW正方向还是CW负方向旋转,POT\NOT信号只能输入指令方向有关,比如设置0时,POT信号打开,正方向指今被禁止,电机就不会向正方向旋转。
Pr0.01 控制模式设定
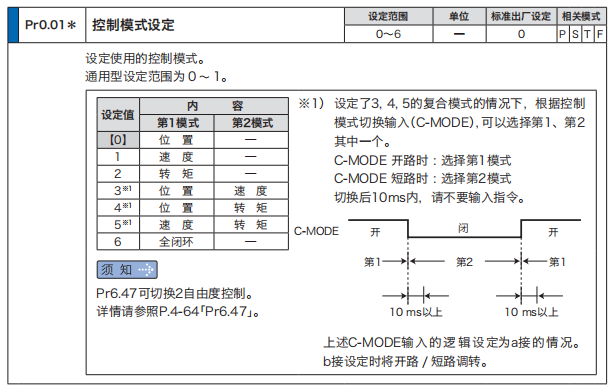
出厂设定为0;其中3、4、5为C-MODE式复合控制模式,复合控制模式在切换时有10ms的延时,如果是垂直轴的话,可能会出掉落的风险,这时就要用设置零速箝位功能(Pr3.15\Pr3.16)。
Pr0.03 实时自动调整机械刚性
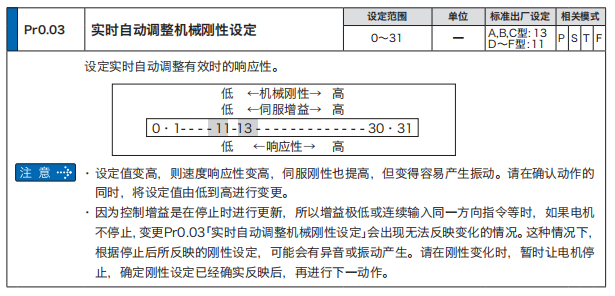
刚性的提高,响应速度也会变快,但容易产生振动,在设定刚性时要一级一级的增加,并观察电机运行情况。
Pr0.04 惯量比
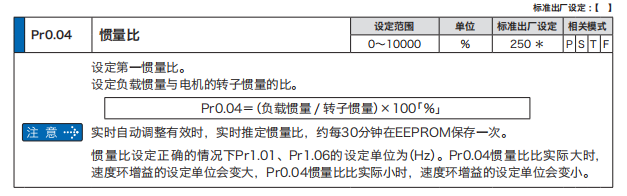
设备初次动时,会自动推定惯量比值并写入驱动器中,但为了更加精确得出惯量比,电机在运行时转速要达到200r/min以上。
但在实际中,如果惯量比达到50倍时,电机出现过载报警,这时候就要手动去增大惯量比的设定值,然后再去推定他的惯量比。
Pr0.15 绝对式编码器设定
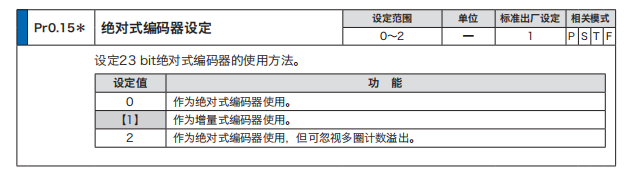
设定为1时作为增量式使用,设定0、2、4时作为绝对式编码器使用。
Pr0.16 外置再生电阻设定
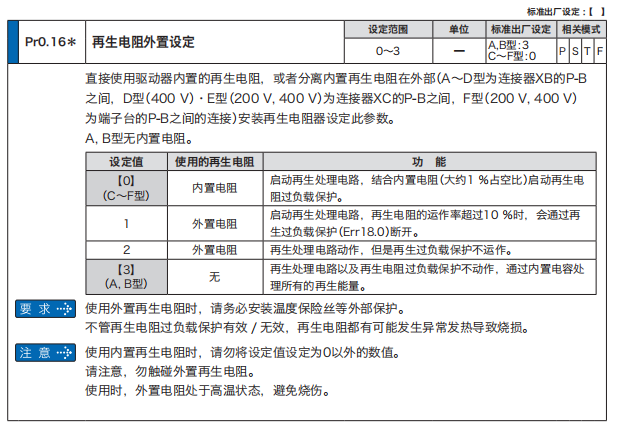
电机在拖动时,会产生能量,这时就要再生电阻要消除能量。A\B型没有内置电阻,出厂值设定为3,C~F型有内置电阻,出厂设定为0。
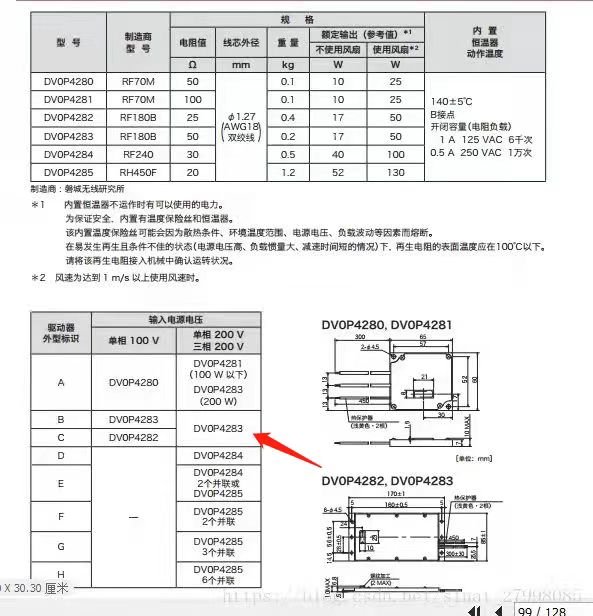
当在垂直轴或者电机减速度较大,产生的再生能量超过驱动器处理能力时,就要加装外置再生电阻了。
应该怎么选再生电阻阻值,请参以下这张图
相关文章

