

松下伺服电子齿轮参数设置与案例
电子齿轮功能参数设置
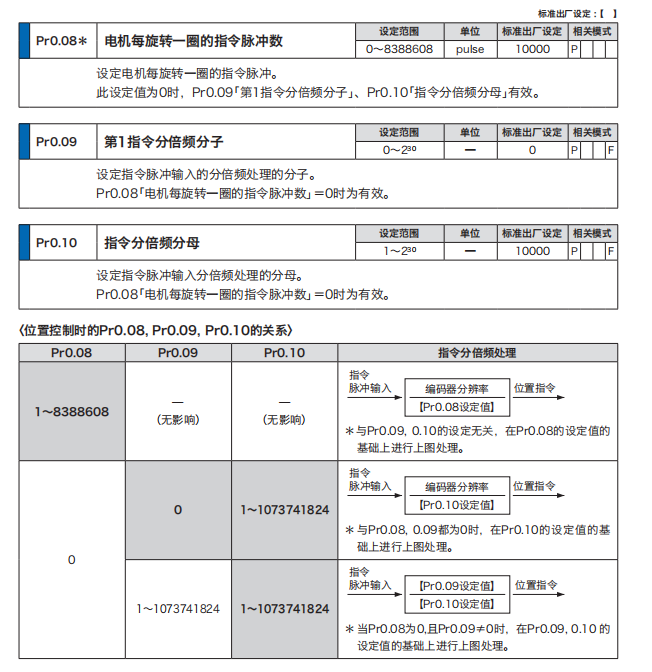
Pr0.08 电机每旋转1圈的指令脉冲数
Pr0.09 第1指令分倍频分子
Pr0.10 指令分信频分母
电子齿轮功能介绍
电子齿轮比功能是一种在电子设备中实现齿轮传动效果的技术。它通过电子信号处理和控制来模拟传统机械齿轮的传动比例关系,以实现对运动或转速的精确控制。
在传统的机械系统中,齿轮通过啮合来改变传动比例,从而实现转速的调整或转矩的传递。而在电子齿轮功能中,不需要实际的机械齿轮,而是利用电子电路和控制器来实现类似的功能。
电子齿轮功能通常由以下几个部分组成:
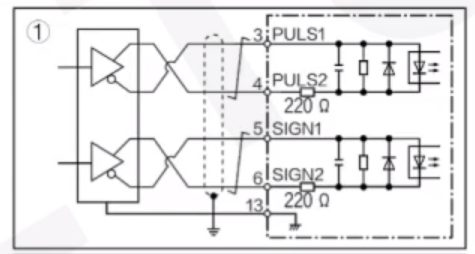
输入信号(上位控制发送指令):该信号可以是来自传感器、编码器或其他数据源的脉冲信号,代表运动或转速的信息。
电子控制器(驱动器):接收输入信号并进行处理,根据设定的传动比例计算输出信号。
输出信号:根据电子控制器的计算结果,生成相应的输出信号,用于控制电机、驱动器或其他执行机构。
通过调整电子齿轮的传动比例,可以实现对运动或转速的精确控制。例如,可以将输入信号的频率按照一定比例缩放,从而改变输出信号的频率和转速。这样可以实现对电机转速的精确控制,满足不同的应用需求。

电子齿轮功能具有以下优点:
高精度:可以实现非常精确的传动比例控制,提供准确的转速和位置控制。
可编程性:可以通过编程设置不同的传动比例,适应不同的应用场景和需求。
快速响应:电子信号处理速度快,可以实现快速的响应和调整。
无机械磨损:不需要实际的机械齿轮,避免了机械磨损和故障的问题。
松下伺服电子齿轮功能设置
主要是设置上位指令单位和编码器指令的变化关系
Pr0.08、Pr0.09、Pr0.10设置
使用情况:
1、(常用的设置方法)电机每旋转一圈的指令脉冲数为整数且<2的23次方,Pr0.08≠0,指令脉冲输入=[编码器分辨率]/[Pr0.08设定值]
2、电机每旋转一圈的指令脉冲数为整数且>2的23次方,Pr0.08=0、Pr0.09=0,指令脉冲输入=[编码器分辨率]/[Pr0.10设定值]
3、电机每旋转一圈的指令脉冲数不为整数,Pr0.08=0、Pr0.09≠0,指令脉冲输入=[Pr0.09设定值]/[Pr0.10设定值]
举例子:
上位发送100000个脉冲给伺服,电机带的负载移动了100mm,传动轮直径50/πmm,减速机为1/10,电机编码器分辨率23bit。
1)计算传动轮旋转1圈的移动量: πx(50/π)=50mm
2)负载移动100mm,传动轮旋转园数=100m/50mm=2
3)减速比为1/10所以传动轮旋转2圈,电机旋转20圈
4)计算电机旋转一圈对应的指令脉冲数:100000/20=5000 pulse
5)设置参数:Pr0.08=5000
相关文章

