

松下伺服RS485\RS232通信
松下伺服RS485\RS232通信使用方法:
适用于SG、SF驱动器
一、配线
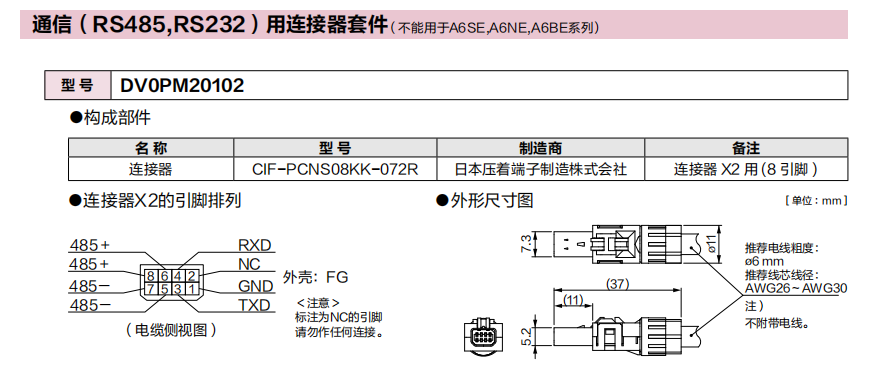
驱动器端:
同时使用多台的时候,连接上位控制器使用。提供RS232和RS485的接口。
连接器端:
二、连接方法:
本驱动器拥有RS232以及RS485的2种通信功能,可使用如3所示的连接方法。
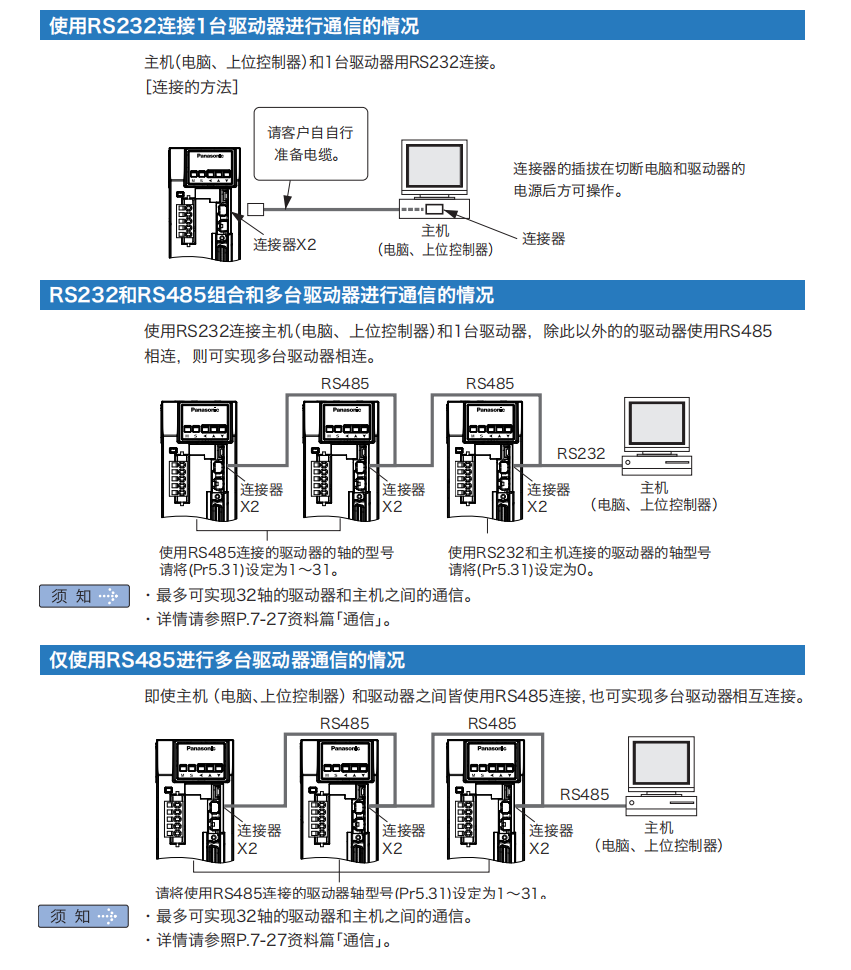
使用RS232连接1台驱动器进行通信的情况
主机(电脑、上位控制器)和1台驱动器用RS232连接。
[连接的方法]
要求:
连接器X1-X6为二次电路,一次电源(特别是控制电源用直流电源DC24 V和制动器用直流电源DC24 V)之间需要进行绝缘。
请勿连接相同电源。
三、通信:
通信线路的连接
MINAS-A6系列持有RS232和RS485的2种通信端口。与主机之间可通过下述3进行连接
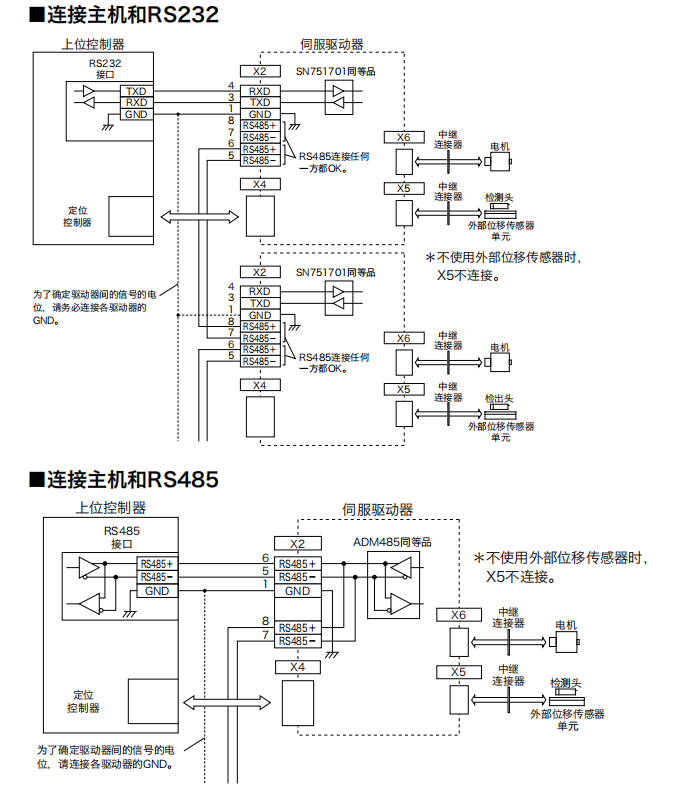
1、IRS232通信
将主机和驱动器用RS232通信1:1连接,依照RS232的传送协议进行通信。
Pr5.31中虽有设定MINAS-A6的模块ID,但在上述情况时请设定为0~31。
特别是主机侧的管理上若无问题即使设定相同模块的ID也不会有影响。
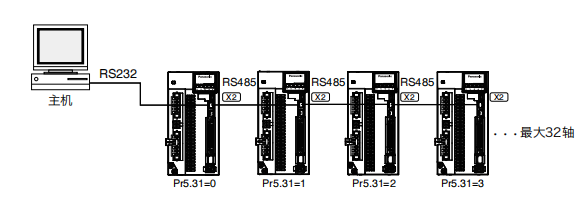
2、RS232和RS485通信
将一台的主机和多台MINAS-A6连接时,通过主机用RS232通信连接到连接器X2MINAS-A6之间用RS485通信连接。
主机连接的MINAS-A6的Pr5.31设定为0,其他的MINAS-A6分别设定131的数值。
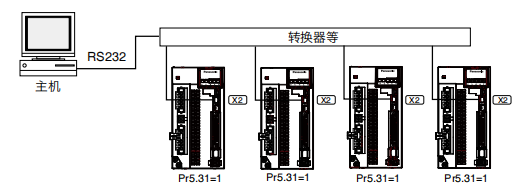
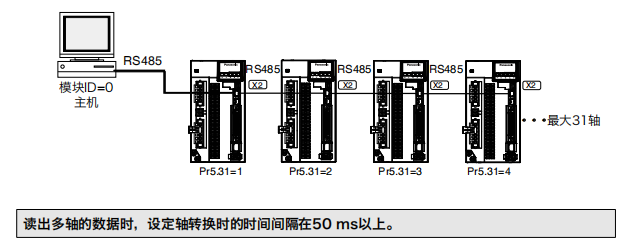
3、RS485通信
用RS485通信连接1台主机和多台MINAS-A6,各MINAS-A6的Pr5.31设定为1~31的数值。
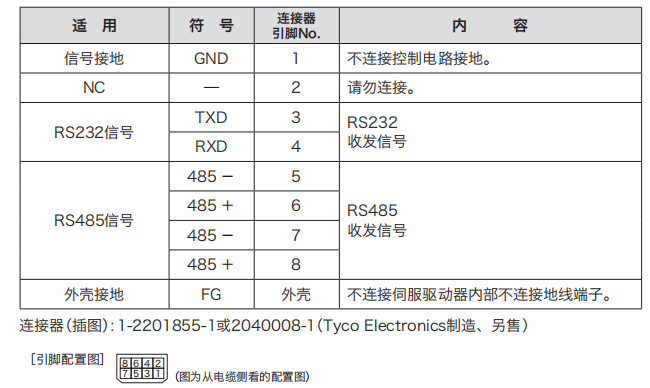
4、通信连接器部接口
5、通信方式
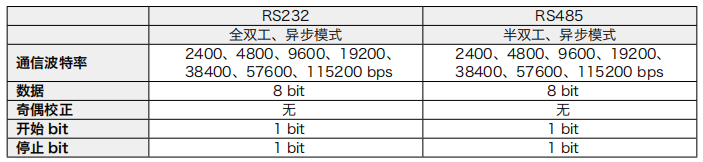
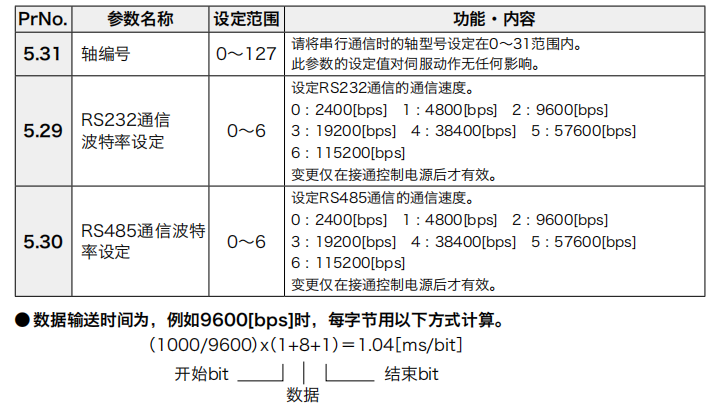
请用Pr5.29设定上表的RS232通信波特率,Pr5.30设定RS485通信波特率。
此参数的变更仅在接通控制电源后有效。详情请参照下一页通信相关参数一览表。
6、通信相关参数设定
但是,实际的通信时间为指令处理时间加上电路以及收发控制器的切换时间之和。
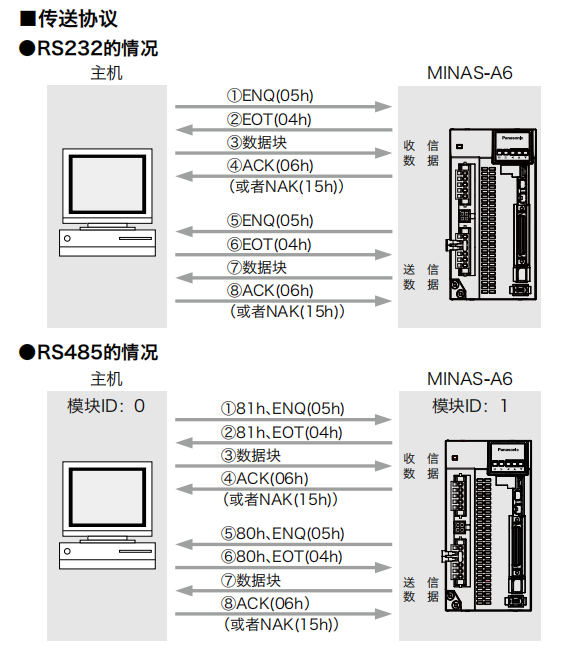
握手源代码
用下述代码进行线路控制。

ENQ···..·有送信程序块时发出。
EOT.....·可接收程序块时发出。通信线路发出ENQ,接收EOT后成为送信模式
接收ENQ,发出EOT后成为收信模式
ACK···.·· 判断所接收的程序块为正常时发出。
NAK···..· 收信程序块异常时发出,根据checksum、超时判断正常或异常
RS485通信状态下,ENQ、EOT在下述模块识别字节的基础上附加一个字节。模块识别字
节···Pr5.31的数值为模块ID,将此bit7设定为1后的数据作为模块识别字节。
注意:
RS485通信状态下,ENQ、EOT在下述模块识别字节的基础上附加一个字节。模块识别字
节···Pr5.31的数值为模块ID,将此bit7设定为1后的数据作为模块识别字节。

模块ID:RS485通信下通信盒侧的模块ID为0,因此请将MINAS-A6的Pr5.31设定为1~31.
7.传输序列
线路控制
进行传送方向以及竞争的解决。
收信模式···接收ENQ,返回EOT时开始。送信模式···发送ENQ,接收EOT时开始。收发信号竞争时···从机侧时,如发送ENQ后等待EOT收信状态下接收ENQ(对方主机侧的)ENQ优先进入收信模式
送信控制
进入送信模式后,命令块连续送信,之后进入ACK收信等待。ACK收信后送信结束。命令字节数发生输送错误时,可能会发生ACK不应答的情况,但在T2以内ACK无法收信时,或者收到NAK或ACK以外的编码时再继续尝试。再尝试返回ENQ开始。
收信控制
进入收信模式后,持续接收送信程序块,根据最初的字节取得命令字节数,持续接收此字节数+3。收信数据总和为0时,当作收信正常,将ACK作为回信。checksum异常或者符号超时时发送NAK。
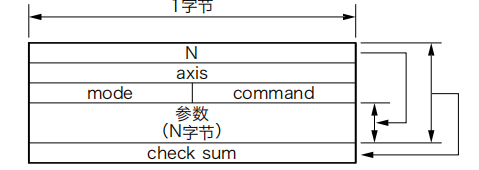
N: 命令字节数(0~240)表示命令需要的参数数值。
axis:设定驱动器的Pr5.31的数值。(0~127)
command: 控制命令(0~15)
mode:命令执行模式(0~15)根据命令内容各异。
check sum: 程序块起始至结束前的字节单位之和的2的补码。
协议参数
作为控制程序块传送的参数,会有以下数值。可用后述的INIT命令设定任意数值。
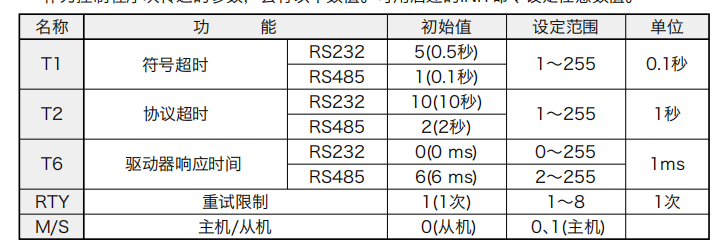
T1: 驱动器和模块识别字节与ENQ、EOT之间,或者从收到收发信号数据块中的符号码到接收下一个符号码的容许时间。若超过此时间,则会出现超时报警,向发信方返送NAK。
T2: 驱动器从送出ENQ后,直至收到EOT的容许时间。若超过此时间,收信侧是否为收信状态,显示什么原因导致无法接收ENQ代码。此时再次向收信侧发送ENQ代码。(重试次数)从发出EOT后,直至接收到最初的符号的容许时间。超过此时间时回信NAK,收信模式结束。
从发出checksum字节直至接收ACK的容许时间。若超过此时间,返送NAK,再次往收信侧发送ENQ编码。
T6: 从驱动器接收ENQ到发出EOT的时间。驱动器在接收checksum字节到发出ACK的时间,以及从驱动器接收EOT到发出最初的符号的时间。
RTY: 重试次数的最大值。若超过此数值侧发生送信错误。
M/S: 主机/从机切换。发生ENQ的竞争时,需决定优先顺序。(0为从机模式,1为主机模式)优先在主机设定的送信。
https://www.mada1688.com/download/719.html


相关文章

